シリアル通信によるデバイス制御¶
はじめに¶
ここでは,Armadillo300を対象にシリアル通信を行うプログラムに関する知識を修得する. また,シリアル通信によってコマンド式のサーボ・センサをコントロールし,実機の扱いになれる.
概要¶
本ゼミは,以下の特徴をもったプログラミング演習である.
- シリアル通信に関するプログラミングを行う
- シリアル通信によるデバイス制御を行う
シリアル通信は広範囲に使われている技術である.本演習では,最も基礎となるRS-232C経由でのシリアル通信を対象とし,シリアル通信プログラミングの基礎を修得することを目的とする.
また,本演習ではシリアル通信を用いてハードウェアデバイスの制御を行う.ハードウェアを用いた場合,シミュレーション実験では現れないノイズや個体差が問題となってくる.本演習では実機を使用することで,この特有の問題を体験してもらう. ここで ハードウェアを制御する方法 は直接方式とコマンド方式がある.本演習ではシリアル通信を用いて制御を行うため,コマンド方式となる.
使用する実験機器¶
今回使用するデバイスを図1~5に示す.armadillo300単体を図1に示す.また図2にarmadillo300によって制御されるセンサ・アクチュエータとその制御デバイスを示す.センサコントローラ,サーボコントローラはarmadillo300からシリアル通信で送られてくるコマンドを解釈し,センサから情報取得およびサーボの動作を行う.その結果はシリアル通信でarmadillo300へ送られる.ここでarmadillo300のシリアルデバイスとコントローラのシリアルデバイス間で信号電圧に互換性がないためPC接続ボードによって信号電圧の変換を行っている.これらを使用した実験デバイスを図3~5に示す.実験デバイス前方には距離センサを1つ搭載し,アクチュエータを1つ搭載している.上部にはメータをプリントしており,アクチュエータはメータ上の針を駆動させる.

図1. Armadillo300
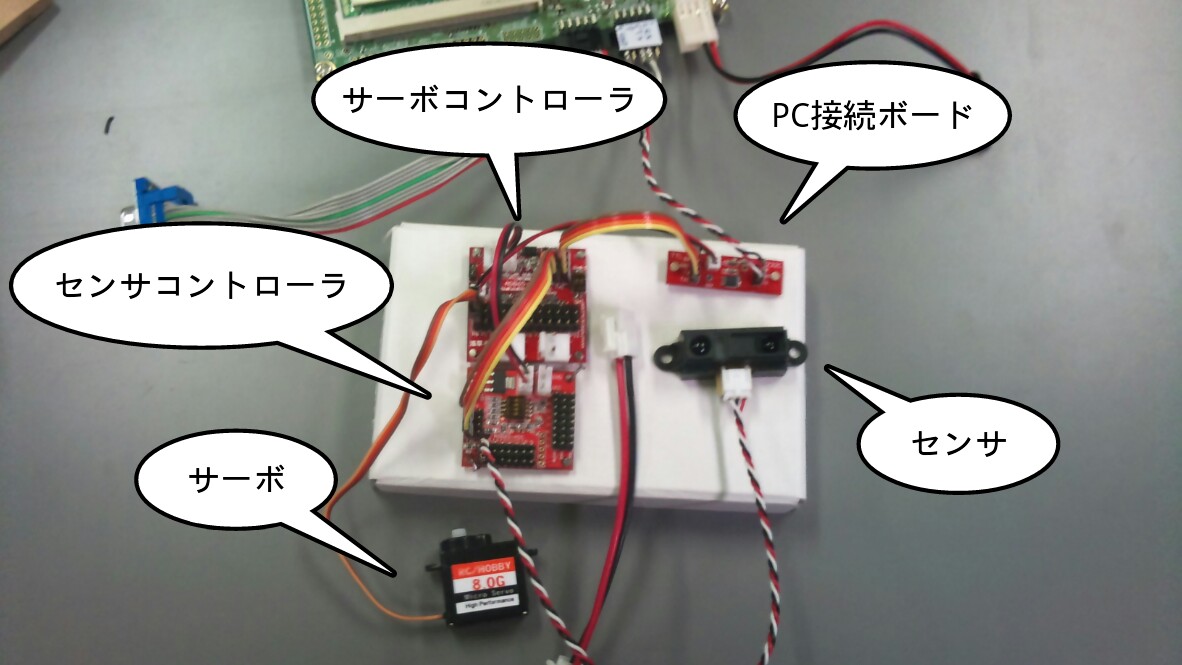
図2. サーボ・センサコントローラ
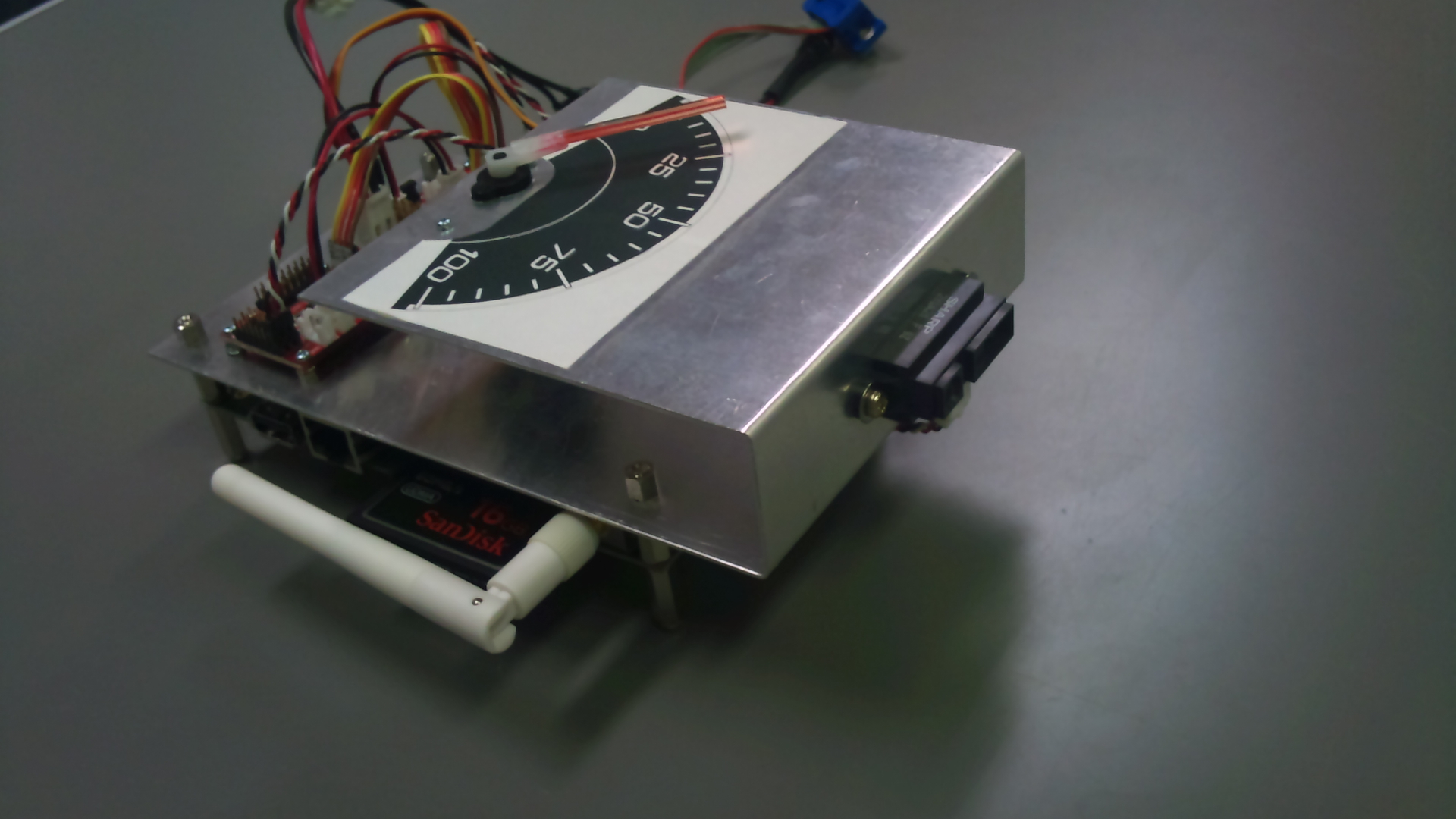
図3. 使用機器前方図
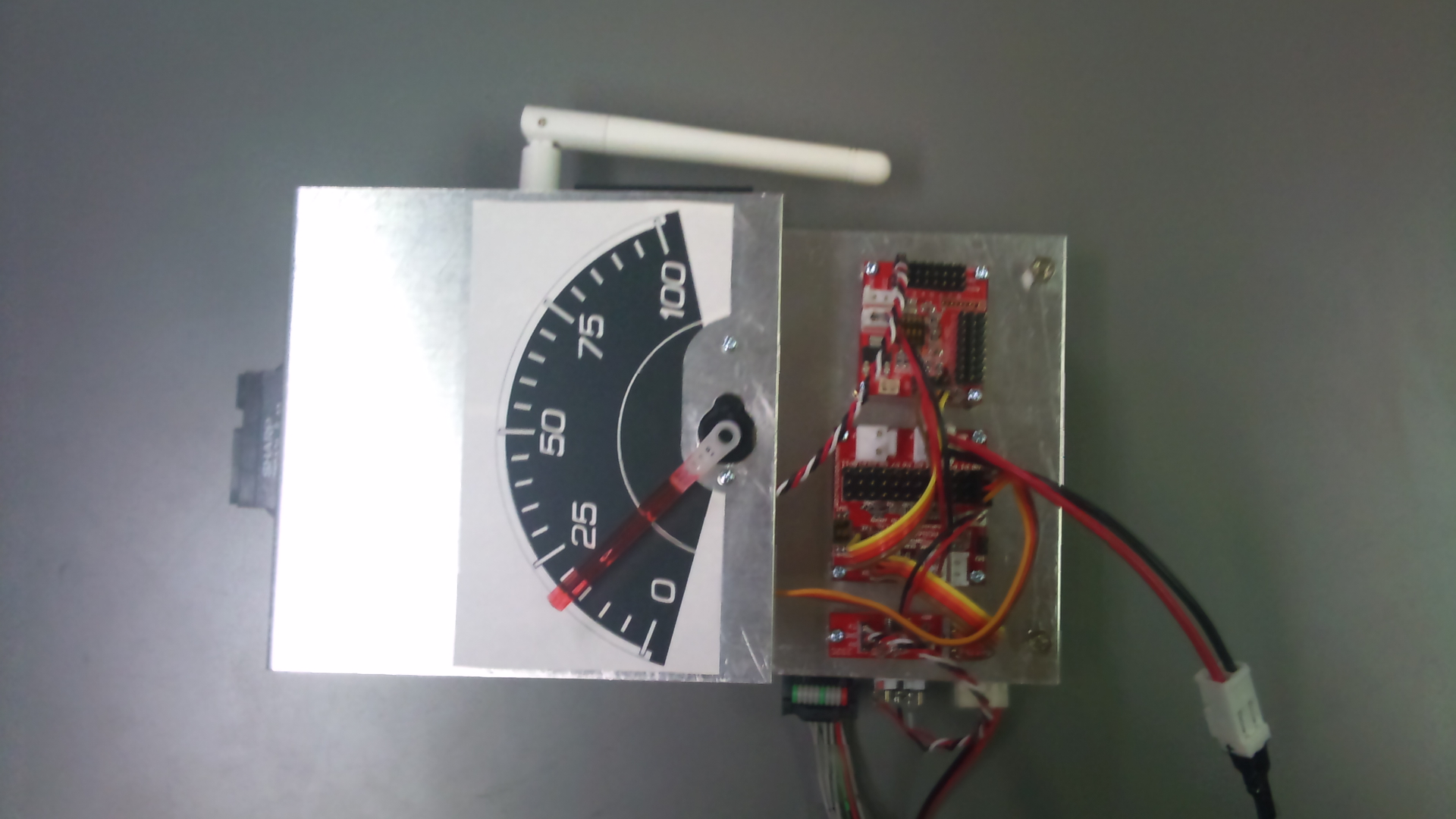
図4. 使用機器上方図
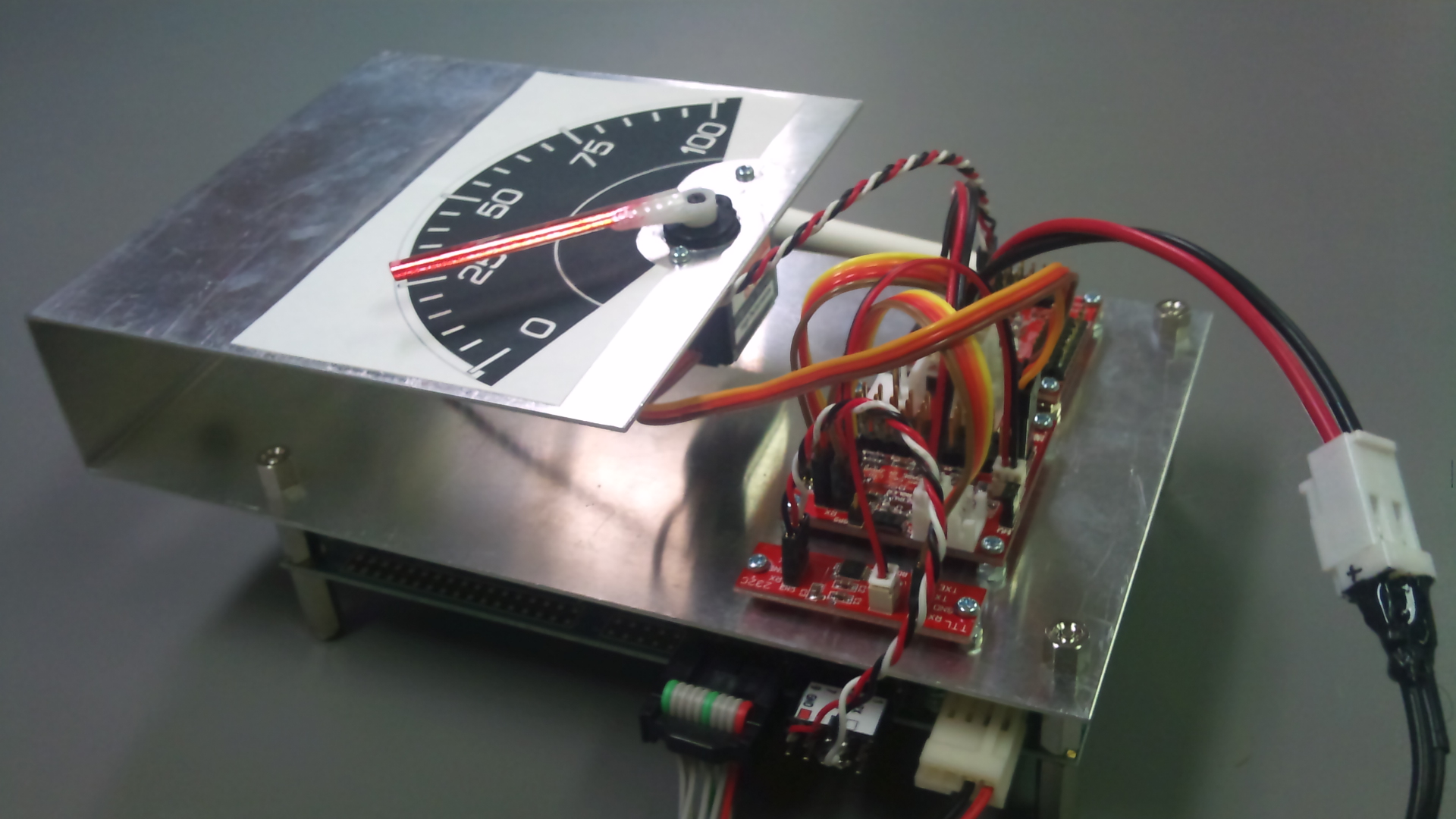
図5. 使用機器後方図
構成¶
シリアル通信によるデバイス制御ゼミの構成は以下のようになる.
- 準備
- ゼミを行うためのデバイスの準備
- サーボプログラミング
- サーボ動作を行うプログラミング
- センサプログラミング
- センサからの情報取得を行うプログラミング
- センサ・サーボプログラミング
- センサを使って情報取得をし,それをもとにサーボを動作させるプログラミング
プログラム演習¶
基本的には,基本的には,まずサンプルプログラムを打ち込み,コンパイル・実行してみる.その後,概要や参考情報を見ながら理解を深める.
サーボ駆動プログラムの作成¶
サーボ駆動プログラムの作成 を行い,サーボの制御に関して実体験する.
センサ情報取得プログラムの作成¶
センサ情報取得プログラムの作成 を行い,センサからのデータ取得方法に関して実体験する.